एसिंक्रोनस मोटर की शुरुआती धारा क्या है। अतुल्यकालिक मोटर्स शुरू करने के तरीके
लांचरों इंजन गुण .
शुरू करते समय, मोटर रोटर, लोड टॉर्क और जड़ता के क्षण पर काबू पाने, घूर्णी गति से तेज होता है पी= 0 इससे पहले पी . पर्ची तब से बदल जाती है एस पी = 1 इससे पहले एस . शुरू करते समय, दो बुनियादी आवश्यकताओं को पूरा किया जाना चाहिए: टोक़ प्रतिरोध के क्षण से अधिक होना चाहिए ( एमवीआर> एमसाथ) और चालू चालू मैं पीजितना संभव हो उतना छोटा होना चाहिए।
रोटर के डिजाइन (शॉर्ट-सर्किट या चरण), मोटर शक्ति, भार की प्रकृति के आधार पर, विभिन्न तरीकेप्रारंभ: सीधी शुरुआत, अतिरिक्त प्रतिरोध का उपयोग करना शुरू करें, कम वोल्टेज से शुरू करें, आदि। विभिन्न प्रारंभिक विधियों पर नीचे और अधिक विस्तार से चर्चा की गई है।
सीधी शुरुआत। स्टेटर वाइंडिंग के मेन वोल्टेज को सीधे चालू करके इंजन को चालू करना डायरेक्ट स्टार्ट कहलाता है। डायरेक्ट स्टार्ट सर्किट को अंजीर में दिखाया गया है। 3.22. जब स्विच पहले क्षण में चालू होता है, तो पर्ची एस = मैं, और रोटर में कम करंट और इसके बराबर स्टेटर करंट
, (3.37)
अधिकतम हैं (एस = 1 के लिए आइटम 3.19 देखें)। जैसे-जैसे रोटर तेज होता है, स्लिप कम होती जाती है और इसलिए स्टार्ट-अप के अंत में, करंट पहले पल की तुलना में बहुत कम होता है। सीधी शुरुआत के साथ सीरियल मोटर्स में, शुरुआती करंट k I \u003d I P / I 1NOM \u003d (5, ..., 7) की बहुलता, और एक बड़ा मान अधिक शक्ति के इंजनों को संदर्भित करता है।

आरंभिक बलाघूर्ण का मान (3.23) से s = 1 पर पाया जाता है: 
अंजीर से। 3.18 यह देखा जा सकता है कि शुरुआती टोक़ नाममात्र के करीब है और महत्वपूर्ण से बहुत कम है। सीरियल मोटर्स के लिए, शुरुआती टोक़ अनुपात एम पी / एम एनओएम = (1.0, ..., 1.8)।
दिखाए गए डेटा से पता चलता है कि डायरेक्ट स्टार्टिंग के दौरान, मोटर की आपूर्ति करने वाले नेटवर्क में एक इनरश करंट होता है, जिससे वोल्टेज इतनी बड़ी हो सकती है कि इस नेटवर्क से फीड की गई अन्य मोटरें बंद हो सकती हैं। दूसरी ओर, लोड के तहत शुरू होने पर छोटे शुरुआती टॉर्क के कारण, मोटर शाफ्ट पर प्रतिरोध के क्षण को पार नहीं कर सकता है और नहीं चलेगा। इन कमियों के कारण, सीधी शुरुआत का उपयोग केवल छोटी और मध्यम शक्ति (लगभग 50 kW तक) के इंजनों के लिए किया जा सकता है।
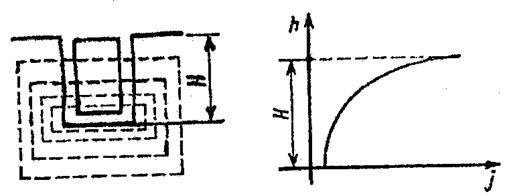
बेहतर शुरुआती गुणों वाले इंजन शुरू करना। गिलहरी पिंजरे के विशेष डिजाइन के कारण रोटर में वर्तमान विस्थापन के प्रभाव का उपयोग करके एसिंक्रोनस मोटर्स के शुरुआती गुणों में सुधार प्राप्त किया जाता है। वर्तमान विस्थापन प्रभाव इस प्रकार है: रोटर स्लॉट में कंडक्टरों का फ्लक्स लिंकेज और इंडक्टिव रिएक्शन एक्स 2 जितना अधिक होगा, वे स्लॉट के नीचे के करीब होंगे (चित्र। 3.23)। साथ ही X 2 रोटर की करंट फ्रीक्वेंसी के सीधे आनुपातिक है।
इसलिए, इंजन शुरू करते समय, जब एस = 1 और एफ 2 = एफ 1 = 50 हर्ट्ज, आगमनात्मक प्रतिक्रिया एक्स 2 = अधिकतम और इसके प्रभाव में, वर्तमान खांचे की बाहरी परत में विस्थापित हो जाता है। निर्देशांक h के अनुदिश धारा घनत्व j चित्र 3.24 में दर्शाए गए वक्र के अनुदिश वितरित है। नतीजतन, करंट मुख्य रूप से कंडक्टर के बाहरी सेक्शन से होकर गुजरता है, यानी। रॉड के बहुत छोटे हिस्से पर, और, परिणामस्वरूप, रोटर वाइंडिंग R 2 का सक्रिय प्रतिरोध सामान्य ऑपरेशन की तुलना में बहुत अधिक है। इसके कारण, शुरुआती धारा कम हो जाती है और शुरुआती टॉर्क M P बढ़ जाता है (देखें (3.37), (3.38))। जैसे ही मोटर तेज होती है, रोटर करंट की स्लिप और फ्रीक्वेंसी कम हो जाती है और स्टार्ट के अंत तक 1-4 हर्ट्ज तक पहुंच जाती है। इस आवृत्ति पर, आगमनात्मक प्रतिक्रिया छोटी होती है और धारा को कंडक्टर के पूरे क्रॉस सेक्शन में समान रूप से वितरित किया जाता है। एक मजबूत वर्तमान विस्थापन प्रभाव के साथ, कम दबाव धाराओं और उच्च प्रारंभिक टोक़ के साथ सीधी शुरुआत संभव है।
बेहतर शुरुआती गुणों वाले मोटर्स में डीप स्लॉट रोटार, डबल गिलहरी केज और कुछ अन्य के साथ मोटर्स शामिल हैं।
चित्र.3.23 3.24
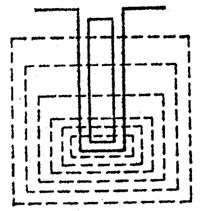
गहरी नाली मोटर्स। जैसा कि चित्र 3.25 में दिखाया गया है, रोटर स्लॉट एक संकीर्ण स्लॉट के रूप में बनाया गया है, जिसकी गहराई इसकी चौड़ाई से लगभग 10 गुना अधिक है। संकीर्ण तांबे की पट्टियों के रूप में घुमावदार इन खांचे-स्लिट्स में रखा गया है। चुंबकीय प्रवाह वितरण से पता चलता है कि कंडक्टर के निचले भाग में अधिष्ठापन और आगमनात्मक प्रतिक्रिया शीर्ष की तुलना में बहुत अधिक है। इसलिए, स्टार्ट-अप पर, रॉड के ऊपरी हिस्से में करंट विस्थापित हो जाता है और सक्रिय प्रतिरोध काफी बढ़ जाता है। जैसे ही मोटर तेज होती है, पर्ची कम हो जाती है, और क्रॉस सेक्शन पर वर्तमान घनत्व लगभग समान हो जाता है। वर्तमान विस्थापन के प्रभाव को बढ़ाने के लिए, गहरे खांचे न केवल एक स्लॉट के रूप में, बल्कि एक ट्रेपोजॉइडल आकार में भी बनाए जाते हैं। इस मामले में, खांचे की गहराई एक आयताकार आकार की तुलना में थोड़ी कम है।
डबल पिंजरे इंजन। ऐसी मोटरों में, रोटर वाइंडिंग दो कोशिकाओं (चित्र। 3.26) के रूप में बनाई जाती है: बाहरी खांचे में 1 पीतल के कंडक्टरों की एक वाइंडिंग को आंतरिक में रखा जाता है 2 - तांबे के कंडक्टरों की वाइंडिंग। इस प्रकार, बाहरी घुमावदार में आंतरिक की तुलना में अधिक सक्रिय प्रतिरोध होता है। स्टार्ट-अप के दौरान, बाहरी वाइंडिंग को बहुत कमजोर चुंबकीय प्रवाह के साथ जोड़ा जाता है, और आंतरिक एक अपेक्षाकृत मजबूत क्षेत्र के साथ। नतीजतन, करंट बाहरी सेल में बाहर चला जाता है, और आंतरिक सेल में लगभग कोई करंट नहीं होता है।
जैसे ही इंजन तेज होता है, बाहरी सेल से करंट आंतरिक सेल में जाता है और s = s NOM पर, मुख्य रूप से आंतरिक सेल से होकर बहता है। बाहरी सेल में करंट अपेक्षाकृत छोटा होता है। परिणामी प्रारंभिक टोक़, जो दो पिंजरों से क्षणों का योग है, सामान्य डिज़ाइन मोटर्स की तुलना में बहुत बड़ा है, और गहरे स्लॉट मोटर्स की तुलना में कुछ हद तक बड़ा है। हालांकि, यह ध्यान में रखा जाना चाहिए कि डबल-केज रोटर मोटर्स की लागत अधिक है।
स्टेटर वाइंडिंग को स्विच करके प्रारंभ करें।
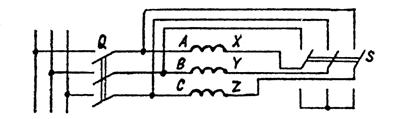
यदि, मोटर के सामान्य संचालन के दौरान, स्टेटर चरण एक त्रिकोण में जुड़े होते हैं, तो, जैसा कि चित्र 3.27 में दिखाया गया है, शुरू करते समय, वे शुरू में एक स्टार से जुड़े होते हैं। ऐसा करने के लिए, स्विच क्यू को पहले चालू किया जाता है, और फिर स्विच एस को नीचे की स्थिति में रखा जाता है। शुरू. इस स्थिति में, चरण X, Y, Z के सिरे आपस में जुड़े हुए हैं, अर्थात। चरण स्टार जुड़े हुए हैं। इस मामले में, चरण वोल्टेज रैखिक एक से √3 गुना कम है। नतीजतन, स्टार्ट-अप पर लाइन करंट डेल्टा में कनेक्ट होने की तुलना में 3 गुना कम है। जब रोटर प्रारंभ के अंत में गति करता है, तो स्विच S को ऊपरी स्थिति में ले जाया जाता है और, जैसा कि अंजीर से देखा जा सकता है। 3.27, स्टेटर चरणों को एक त्रिभुज में फिर से जोड़ा जाता है। इस पद्धति का नुकसान यह है कि शुरुआती टोक़ भी 3 गुना कम हो जाता है, क्योंकि क्षण चरण वोल्टेज के वर्ग के समानुपाती होता है, जो कि 3 गुना कम होता है जब चरण एक स्टार से जुड़े होते हैं। इसलिए, यह विधि एक छोटे लोड टॉर्क के साथ लागू होती है और केवल उन मोटर्स के लिए लागू होती है जो सामान्य रूप से संचालित होती हैं जब स्टेटर वाइंडिंग डेल्टा में जुड़ी होती हैं।
स्टेटर सर्किट में अतिरिक्त प्रतिरोधक शामिल होने पर प्रारंभ करें . (चित्र। 3.28)। प्रारंभ करने से पहले, स्विच (स्टार्टर) खुली अवस्था में होता है और स्विच Q 1 बंद हो जाता है।
इस मामले में, स्टेटर सर्किट में अतिरिक्त प्रतिरोधक आर डीओबी शामिल हैं। नतीजतन, स्टेटर वाइंडिंग एक कम वोल्टेज U 1n \u003d U 1NOM द्वारा संचालित होता है - मैंएन आर एपीपी। मोटर के तेज होने के बाद, स्विच Q 2 बंद हो जाता है और स्टेटर वाइंडिंग को रेटेड वोल्टेज U 1NOM पर स्विच कर दिया जाता है। आर डीओबी का चयन करके, आप शुरुआती धारा को अनुमेय तक सीमित कर सकते हैं। यह ध्यान में रखा जाना चाहिए कि शुरुआती टोक़, यू 2 1 पी के आनुपातिक, कम होगा और (यू 1 पी / यू 1 एनओएम) 2 नाममात्र है। यह ध्यान रखना महत्वपूर्ण है कि इस प्रारंभिक विधि के साथ, प्रतिरोध R DOB (R DOB .) में महत्वपूर्ण नुकसान हैं मैं 2 1एन)। प्रतिरोधों आर डीओबी के बजाय, आप आर डीओबी के करीब आगमनात्मक प्रतिरोध एक्स डीओबी के साथ कॉइल चालू कर सकते हैं।
कॉइल के उपयोग से प्रतिरोध शुरू करने में होने वाले नुकसान को कम करना संभव हो जाता है।


चित्र.3.29 चित्र.3.28
ऑटोट्रांसफॉर्मर शुरू। इन विधियों के अतिरिक्त, आप तथाकथित ऑटोट्रांसफॉर्मर प्रारंभ लागू कर सकते हैं।
संबंधित सर्किट चित्र 3.29 में दिखाया गया है। प्रारंभ करने से पहले, स्विच S को स्थिति पर सेट किया जाता है 1 , और फिर ऑटोट्रांसफॉर्मर चालू होता है और स्टेटर कम वोल्टेज यू 1 पी द्वारा संचालित होता है। मोटर कम वोल्टेज पर गति करता है और त्वरण स्विच के अंत में एस को सेट किया जाता है 2 और स्टेटर रेटेड वोल्टेज U 1nom द्वारा संचालित होता है।
यदि स्टेप-डाउन ट्रांसफार्मर का परिवर्तन अनुपात एन , फिर वर्तमान मैंइसके प्रवेश द्वार पर होगा एन गुना कम। इसके अलावा, प्रारंभिक धारा भी होगी एन गुना कम, यानी। नेटवर्क में स्टार्ट-अप पर करंट होगा एन 2 सीधी शुरुआत से कई गुना कम।
यह विधि, हालांकि अनुच्छेद 3.14.7 में मानी गई विधियों से बेहतर है, बहुत अधिक महंगी है।
एक चरण रोटर के साथ एक मोटर शुरू करना।
एक चरण रोटर के साथ एक मोटर शुरू करना रोटर सर्किट में एक प्रारंभिक रिओस्टेट को शामिल करके किया जाता है, जैसा कि अंजीर में दिखाया गया है। 3.30। रोटर वाइंडिंग के चरणों की शुरुआत स्लिप रिंग से जुड़ी होती है और ब्रश के माध्यम से प्रतिरोध के साथ शुरुआती रिओस्टेट से जुड़ी होती है आरपी.
![]() स्टार्टिंग रिओस्टेट का प्रतिरोध स्टेटर वाइंडिंग तक कम हो गया आरपी
गणना की जाती है ताकि शुरुआती टोक़ अधिकतम हो, यानी। आलोचनात्मक के बराबर। स्टार्ट-अप स्लिप के बाद से एस पी= 1, तो एस पी = 1 = एस के, समानता एम पी \u003d एम पी अधिकतम \u003d एम केउपलब्ध कराया जाएगा। फिर
स्टार्टिंग रिओस्टेट का प्रतिरोध स्टेटर वाइंडिंग तक कम हो गया आरपी
गणना की जाती है ताकि शुरुआती टोक़ अधिकतम हो, यानी। आलोचनात्मक के बराबर। स्टार्ट-अप स्लिप के बाद से एस पी= 1, तो एस पी = 1 = एस के, समानता एम पी \u003d एम पी अधिकतम \u003d एम केउपलब्ध कराया जाएगा। फिर  .
.
इंजन अंजीर में दिखाए गए वक्र के अनुसार शुरू होता है। 3.31। स्टार्ट-अप के समय, यांत्रिक विशेषता पर ऑपरेटिंग बिंदु स्थिति में है एक
, और जब इंजन तेज होता है, तो यह वक्र के साथ चलता है 1
पूरी तरह से चालू रिओस्तात के अनुरूप। बिंदु के अनुरूप एक क्षण में इ, रिओस्तात का पहला चरण चालू होता है और बलाघूर्ण अचानक से बिंदु b तक बढ़ जाता है - इंजन का संचालन बिंदु वक्र 2 तक जाता है; बिंदु d के अनुरूप समय के समय, रिओस्तात का दूसरा चरण बंद कर दिया जाता है, ऑपरेटिंग बिंदु बिंदु पर कूद जाता है साथऔर इंजन प्राकृतिक विशेषता 3 और फिर बिंदु f पर जाता है। रिओस्तात शॉर्ट-सर्किट है, रोटर वाइंडिंग शॉर्ट-सर्किट है, और ब्रश रिंगों से पीछे हट जाते हैं। 
इस प्रकार, चरण रोटर एक सीमित प्रारंभिक धारा के साथ उच्च शक्ति वाले अतुल्यकालिक मोटर्स को शुरू करना संभव बनाता है। हालांकि, यह प्रारंभिक विधि प्रारंभिक रिओस्तात में महत्वपूर्ण नुकसान से जुड़ी है। इसके अलावा, गिलहरी केज मोटर की तुलना में एक घाव रोटर मोटर अधिक महंगी है। इसलिए, स्लिप-रिंग मोटर का उपयोग केवल उच्च शक्ति और उच्च ड्राइव आवश्यकताओं के लिए किया जाता है।
शुरू करने के समय, मोटर रोटर की घूर्णी गति शून्य होती है, और घूर्णन क्षेत्र तुरंत रोटर के संबंध में एक तुल्यकालिक घूर्णी गति प्राप्त कर लेता है, परिणामस्वरूप, रोटर वाइंडिंग में एक बड़ा EMF प्रेरित होता है। इस मामले में, रोटर और स्टेटर धाराएं उनके न्यूनतम मूल्यों से कई गुना अधिक होती हैं, क्योंकि वे बढ़ती रोटर पर्ची के साथ बढ़ती हैं, यानी। इसकी घूर्णन आवृत्ति में कमी के साथ (चित्र 10)।
गिलहरी-पिंजरे रोटर के साथ एसिंक्रोनस मोटर्स का शुरुआती करंट रेटेड करंट से 5-10 गुना अधिक होता है (शुरुआती टॉर्क रेटेड टॉर्क वैल्यू का 1.1-1.8 है)। चूंकि यह धारा मोटर वाइंडिंग से थोड़े समय के लिए प्रवाहित होती है और केवल स्टार्ट प्रक्रिया के दौरान, यदि मोटर बहुत बार-बार शुरू नहीं होती है, तो इससे मोटर ज़्यादा गरम नहीं होती है। इसलिए, छोटी शक्ति के अतुल्यकालिक इलेक्ट्रिक मोटर्स को शुरू करना, एक नियम के रूप में, केवल नेटवर्क से जुड़कर किया जाता है। हालांकि, उन्हें आपूर्ति करने वाले विद्युत नेटवर्क के लिए बड़े इलेक्ट्रिक मोटर्स की बड़ी प्रारंभिक धारा तेज और महत्वपूर्ण (विशेष रूप से कम-शक्ति नेटवर्क में) वोल्टेज वृद्धि का कारण बनती है, जो उसी नेटवर्क में शामिल बिजली के अन्य उपभोक्ताओं पर प्रतिकूल प्रभाव डालती है।
जैसे कि चित्र से देखा जा सकता है। 10, इंडक्शन मोटर का शुरुआती टॉर्क अधिकतम से काफी कम है, और जब रोटर शाफ्ट पर लोड अधिक हो जाता है एमओ इंजन शुरू नहीं होगा। उसी समय, यदि स्टेटर को नेटवर्क से डिस्कनेक्ट नहीं किया जाता है, तो एक बड़े स्टार्टिंग करंट से वाइंडिंग के गर्म होने और मोटर की विफलता हो जाएगी।
वर्णित प्रतिकूल परिस्थितियों को रोकने के लिए, अतुल्यकालिक मोटर्स के शुरुआती प्रवाह को सीमित करना आवश्यक है जब उन पर आपूर्ति वोल्टेज लागू किया जाता है या शुरुआती टोक़ को बढ़ाने के लिए।
स्टार्ट-अप के दौरान एक अतुल्यकालिक मोटर की वाइंडिंग पर वोल्टेज को कम करना विभिन्न तरीकों से प्राप्त किया जाता है:
ऑटोट्रांसफॉर्मर या इंडक्शन रेगुलेटर का उपयोग शुरू करना;
स्टार से डेल्टा में स्टेटर वाइंडिंग के स्विचिंग से शुरू करें;
मोटर स्टेटर वाइंडिंग में अतिरिक्त प्रतिरोध को शामिल करने के साथ शुरू।
हालांकि, जब शुरुआती वोल्टेज कम हो जाता है, तो इंडक्शन मोटर का शुरुआती टॉर्क भी गिर जाता है, क्योंकि यह शुरुआती वोल्टेज के वर्ग के समानुपाती होता है। इसलिए, संकेतित प्रारंभिक विधियों को मुख्य रूप से तंत्र की मोटरों को चलाने के लिए लागू किया जा सकता है, जिन्हें शुरू करते समय बड़े शुरुआती टॉर्क की आवश्यकता नहीं होती है (उदाहरण के लिए, एक प्रशंसक मोटर, एक अनलोड मोटर, एक मोटर शुरू करना) सुस्तीऔर आदि।)।
एक चरण रोटर के साथ एक अतुल्यकालिक इलेक्ट्रिक मोटर को अधिकतम प्रतिरोध के साथ एक प्रारंभिक रिओस्टेट का उपयोग करके शुरू किया जाता है आरएक्सटी, रोटर वाइंडिंग के साथ श्रृंखला में जुड़ा हुआ है (चित्र 3 देखें)। इस मामले में, महत्वपूर्ण पर्ची एसको = ( आर" 2 +आरएक्सट)/( एक्स 1 +एक्स" 2) बढ़ता है, और महत्वपूर्ण क्षण का मूल्य एमकश्मीर = 3 पीयू 1 2/2 1 ( एक्स 1 +एक्स" 2) नहीं बदलता है। अतिरिक्त प्रतिरोध के साथ कृत्रिम टोक़-पर्ची विशेषताओं को अंजीर में दिखाया गया है। 11. आकार आर ext का चयन इस तरह किया जाता है कि क्रिटिकल स्लिप एक के बराबर हो, फिर शुरुआती टॉर्क एक क्रिटिकल वैल्यू तक बढ़ जाएगा। बढ़ोतरी एमवर्तमान के सक्रिय घटक में वृद्धि के कारण होता है। इस प्रकार प्रारंभिक धारा का प्रभावी मूल्य कम हो जाता है।
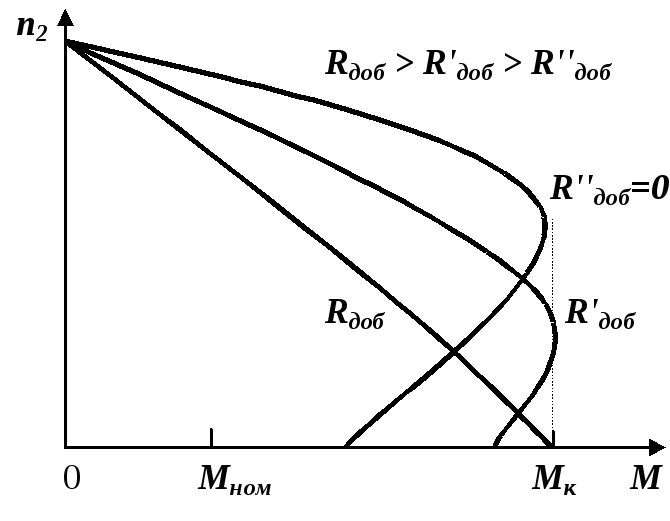
गति में वृद्धि के साथ, रोटर के सापेक्ष चुंबकीय क्षेत्र के घूमने की आवृत्ति कम हो जाती है। तदनुसार, ईएमएफ और रोटर करंट कम हो जाता है। इसलिए, इंजन की गति में वृद्धि के साथ, रोटर घुमावदार सर्किट में प्रारंभिक प्रतिरोध के मूल्य को धीरे-धीरे कम करना संभव है ( आर" ext), इस डर के बिना कि मोटर करंट उन मूल्यों तक बढ़ जाएगा जो इसके लिए खतरनाक हैं। प्रारंभिक रिओस्तात के प्रतिरोध के साथ पूरी तरह से हटा दिया गया ( आर"" ext = 0) इंजन स्टार्ट समाप्त होता है। यह विधि आपको शुरू करने के लिए आवश्यक इंजन के शुरुआती टोक़ को प्रदान करने की अनुमति देती है।
जब कोई युक्ति, तंत्र या युक्ति को प्रचालन में लगाया जाता है, तो कुछ समय के लिए उनमें ऐसी प्रक्रियाएँ होती हैं, जिन्हें अस्थिर या आरंभिक कहते हैं। जीवन से सबसे प्रसिद्ध उदाहरण - शुरू करना, कहते हैं, एक भरी हुई गाड़ी, ट्रेन, स्पष्ट रूप से दिखाती है कि प्रारंभिक बल धक्का आमतौर पर भविष्य में प्रयासों से अधिक की आवश्यकता होती है।
वही घटनाएँ घटित होती हैं बिजली का सामान: लैंप, इलेक्ट्रिक मोटर, इलेक्ट्रोमैग्नेट इत्यादि। इन उपकरणों में शुरुआती प्रक्रियाएं काम करने वाले तत्वों की स्थिति पर निर्भर करती हैं: दीपक का फिलामेंट, इलेक्ट्रोमैग्नेट कॉइल के कोर के मैग्नेटाइजेशन की स्थिति, इंटरइलेक्ट्रोड गैप के आयनीकरण की डिग्री आदि। उदाहरण के लिए, एक प्रकाश बल्ब के फिलामेंट पर विचार करें। यह सर्वविदित है कि ठंडी अवस्था में इसका प्रतिरोध बहुत कम होता है जब यह होता है
1000 डिग्री तक गरम किया जाता है। कार्य मोड में। प्रतिरोध की गणना करने का प्रयास करें
100-वाट प्रकाश बल्ब के लिए फिलामेंट लगभग 490 ओम है, और उपयोग में न होने पर इसे ओममीटर से मापा जाता है, यह मान 50 ओम से कम होता है। और अब सबसे दिलचस्प बात यह है कि शुरुआती करंट की गणना करना है, और आप समझेंगे कि चालू होने पर बल्ब क्यों चालू होते हैं।
यह पता चला है कि चालू होने पर, वर्तमान 4-5 ए तक पहुंच जाता है, और यह 1 किलोवाट से अधिक है। तो क्यों न 100 वाट के बल्ब "बिना किसी अपवाद के" जलते हैं? हाँ, केवल इसलिए कि, गर्म होने पर, प्रकाश बल्ब के फिलामेंट में होता है
प्रतिरोध में वृद्धि, जो स्थिर अवस्था में स्थिर हो जाती है, प्रारंभिक मूल्य से अधिक हो जाती है और ऑपरेटिंग करंट को लगभग 0.5 A तक सीमित कर देती है।
इलेक्ट्रिक मोटर्स का प्रौद्योगिकी में व्यापक अनुप्रयोग है, इसलिए इलेक्ट्रिक ड्राइव के सही संचालन के लिए उनकी शुरुआती विशेषताओं की विशेषताओं का ज्ञान बहुत महत्वपूर्ण है। शाफ्ट पर स्लिप और टॉर्क मुख्य पैरामीटर हैं जो शुरुआती करंट को प्रभावित करते हैं। पहला विद्युत चुम्बकीय क्षेत्र के रोटेशन की गति को रोटर के रोटेशन की आवृत्ति से जोड़ता है और गति के साथ 1 से न्यूनतम मूल्य तक घटता है, और दूसरा शाफ्ट पर यांत्रिक भार निर्धारित करता है, शुरुआत की शुरुआत में अधिकतम और पूर्ण त्वरण के बाद नाममात्र। प्रारंभ करने के क्षण में एक लघु माध्यमिक वाइंडिंग वाले ट्रांसफॉर्मर के बराबर होता है। उसके छोटे होने के कारण
प्रतिरोध, मोटर की प्रारंभिक धारा अचानक अपने नाममात्र मूल्य से दस गुना अधिक हो जाती है।
वाइंडिंग को करंट की आपूर्ति से चुंबकीय क्षेत्र के साथ रोटर कोर की संतृप्ति में वृद्धि होती है, एक ईएमएफ की उपस्थिति। आत्म-प्रेरण, जो आगमनात्मक में वृद्धि की ओर जाता है
सर्किट प्रतिरोध। रोटर घूमने लगता है और स्लिप गुणांक कम हो जाता है, अर्थात। इंजन तेज हो रहा है। इस मामले में, एक स्थिर मूल्य के प्रतिरोध में वृद्धि के साथ प्रारंभिक धारा घट जाती है।
बढ़ते दबाव धाराओं के प्रवाह के कारण समस्याएँ उत्पन्न होती हैं
बिजली की मोटरों के अधिक गर्म होने के कारण, उस समय विद्युत नेटवर्क का अधिभार
स्टार्ट-अप, कनेक्टेड मैकेनिज्म में शॉक मैकेनिकल लोड की घटना, उदाहरण के लिए, गियरबॉक्स। आधुनिक तकनीक में इन मुद्दों को हल करने वाले उपकरणों के दो वर्ग हैं - सॉफ्ट स्टार्टर्स और फ़्रीक्वेंसी कन्वर्टर्स।
उनकी पसंद कई परिचालन के विश्लेषण के साथ एक इंजीनियरिंग कार्य है
विशेषताएँ। लोड इन वास्तविक स्थितियांइलेक्ट्रिक मोटर्स के उपयोग को दो समूहों में बांटा गया है: पंप-पंखा और सामान्य औद्योगिक। सॉफ्ट स्टार्टर्स मुख्य रूप से फैन ग्रुप लोड के लिए उपयोग किए जाते हैं। इस तरह के नियामक वाइंडिंग के वोल्टेज को बदलकर, सामान्य शुरुआत के दौरान 5-10 बार के बजाय शुरुआती करंट को 2 से अधिक नाममात्र मूल्यों तक सीमित नहीं करते हैं।
इलेक्ट्रिक मोटर उद्योग में सबसे व्यापक रूप से उपयोग किए जाते हैं। हालांकि, उनकी डिजाइन की सादगी और कम लागत में है विपरीत पक्ष- कठिन शुरुआती स्थितियां, जो आवृत्ति कन्वर्टर्स की मदद से सुगम होती हैं। आवृत्ति की संपत्ति विशेष रूप से मूल्यवान है
कन्वर्टर्स के लिए दबाव वर्तमान बनाए रखने के लिए
लंबा समय - एक मिनट या अधिक। आधुनिक कन्वर्टर्स के सर्वोत्तम नमूने बुद्धिमान उपकरण हैं जो न केवल प्रारंभिक प्रक्रिया का विनियमन करते हैं, बल्कि किसी भी परिचालन मानदंड के अनुसार प्रारंभ का अनुकूलन भी करते हैं: प्रारंभिक वर्तमान, पर्ची, शाफ्ट टोक़, इष्टतम शक्ति की परिमाण और स्थिरता कारक, आदि
संबंधित आलेख