Sünkroongeneraatorid. sünkroongeneraatorite tööpõhimõte
1. Staator. Sünkroongeneraatori staator, nagu ka teised vahelduvvoolumasinad, koosneb elektriterasest lehtedest valmistatud südamikust, mille soontesse on asetatud vahelduvvoolu mähis, ja raamist - terasplekist malmist või keevitatud korpusest.
Staatori mähis asetatakse südamiku sisepinnale tembeldatud soontesse. Mähise isoleerimine toimub eriti hoolikalt, kuna masin peab tavaliselt töötama kõrge pingega. Isolatsioonina kasutatakse mikaniiti ja mikaniidilinti.
Joonisel fig. 240, arvestades sünkroongeneraatori staatori välimust.
2. Rootor. Sünkroonmasinate rootorid on disaini järgi jagatud kahte tüüpi:
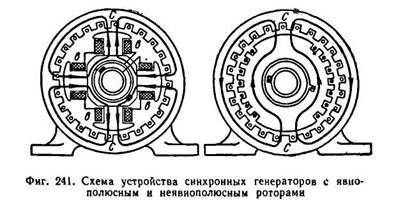
A) selgesõnaliselt poolus (st hääldatud poolustega) ja
B) kaudselt polaarne (st kaudselt väljendatud poolustega).
Joonisel fig. 241 on kujutatud sünkroongeneraatorite seadme skeeme, millel on väljapaistvad ja mitte-suunalised poolusrootorid.
Rootori ühe või teise konstruktsiooni määravad mehaanilise tugevuse kaalutlused. Kaasaegsetes kiirmootoritest (auruturbiin) pöörlevates generaatorites võib rootori ümbermõõt ulatuda 100-160 m/s (mõnel juhul 170 m/s). Seetõttu on kiiretel generaatoritel väljaulatuv poolusrootor. Kiirgeneraatorite pöörlemiskiirus on 3000 p/min ja 1500 p/min.
Silmapaistva pooluse rootor on terasest sepis.
Rootori velje külge on kinnitatud postid, millele on pandud ergutuspoolid, mis on omavahel järjestikku ühendatud. Ergastusmähise otsad on ühendatud kahega
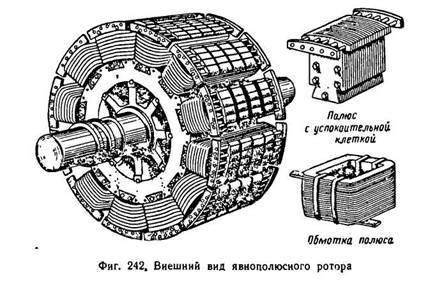
rootori võllile paigaldatud rõngad. Rõngaste peale asetatakse pintslid, millega on ühendatud konstantse pinge allikas. Joonisel fig. 242 näitab väljapaistva poolusrootori välimust. Tavaliselt annab alalisvoolugeneraator, mis istub rootoriga samal võllil ja mida nimetatakse ergutiks, rootori ergastamiseks alalisvoolu. Erguti võimsus on 0,25-1% sünkroongeneraatori nimivõimsusest. Ergutite nimipinge 60-350 V.
Joonisel fig. 243 näitab sünkroonmasina ergutusahelat.
Saadaval on ka iseergastuvad sünkroongeneraatorid. Alalisvool rootori ergastamiseks saadakse generaatori staatori mähisega ühendatud seleenialalditega. Esimesel hetkel indutseerib pöörleva rootori nõrk jääkmagnetismi väli staatori mähises ebaolulise muutuja e. d.s. Vahelduvpingega ühendatud seleenialaldid annavad alalisvoolu, mis tugevdab rootori välja ja generaatori pinge tõuseb.

Väljapaistva poolusega rootor on valmistatud tervest terasest sepisest, mida on töödeldud keerukalt termiliselt ja mehaaniliselt. Toome näitena Elektrosila tehases toodetud 100 tuh kW võimsusega turbogeneraatori rootori andmed n = 3000 p/min juures. Rootori läbimõõt D = 0,99 m, pikkus l=6,35 m Rootori ümbermõõt 155 m/sek. Töödeldud rootori sepis kaalub 46,5 tonni.
Teljesuunas piki rootori ümbermõõtu freesitakse sooned, kuhu asetatakse ergutusmähis. Mähis soontes kinnitatakse metallist (teras või pronks) kiiludega. Mähise esiosad on kinnitatud katte metallrõngastega.
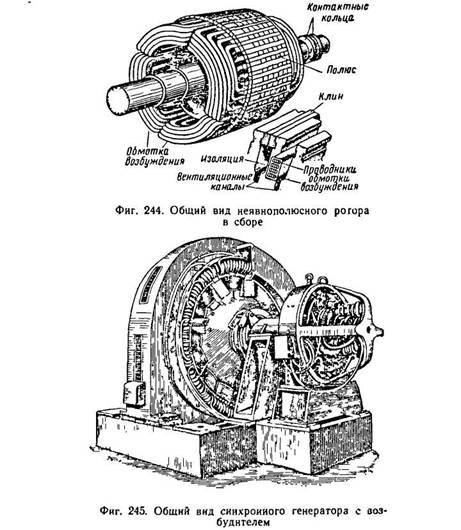
Joonisel fig. 244 näidatud üldine vorm turbogeneraatori kaudse poolusega rootor valmis kujul.
Elektrimasinate ja trafode projekteerimisel pööravad projekteerijad suurt tähelepanu masinate ventilatsioonile. Sünkroongeneraatorite puhul kasutatakse õhk- ja vesinikjahutust.
Õhkjahutus toimub ventilaatorite abil, mis on paigaldatud rootori mõlemale küljele võllile (1,5 kuni 50 tuhat kW võimsusega generaatoritele) või masina all vundamendiaugus (100 tuhat kW võimsusega generaatoritele) .
Ventilatsiooni sisenevad külma õhu massid läbivad filtreid vältimaks masina saastumist tolmuga Suletud ventilatsioonisüsteemi korral jahutatakse masinat sama õhuhulgaga. Masinat läbinud õhk soojeneb ja siseneb õhujahutitesse, seejärel surutakse uuesti masinasse jne. Jahutamiseks toimib ka masina eraldi osadesse paigutatud ventilatsioonikanalite süsteem. Kõige tõhusam viis masina jahutamiseks on vesinikjahutus. Vesinik, mille soojusjuhtivus on 7,4 korda suurem kui õhul, eemaldab paremini soojust masina kuumadest osadest. Õhkjahutusega hõõrdekaod on umbes 50°/o alates
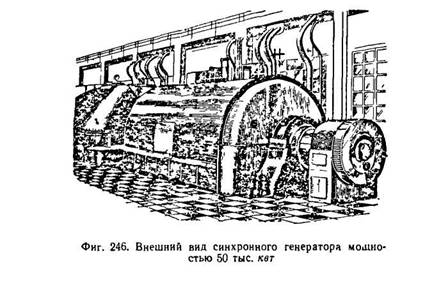
kõigi auto kaotuste summa. Vesiniku erikaal on 14,5 korda väiksem kui õhul. Seetõttu väheneb järsult hõõrdumine vesiniku vastu. Vesinik aitab kaasa ka masina isolatsiooni- ja lakikatete säilimisele. Välimus ergutiga sünkroonne väljapaistva poolusega generaator on näidatud joonisel fig. 245 ja 50 tuhande kW võimsusega sünkroongeneraator - joonisel fig. 246.
Hüdrogeneraatoreid käitavad hüdroturbiinid. Nendel turbiinidel on enamasti madala pöörete arvuga vertikaalvõll. Madala kiirusega sünkroongeneraatoril on suur hulk poolusi ja sellest tulenevalt suured mõõtmed.
Nii näiteks 50 tuhande kW võimsusega hüdrogeneraator, mis on toodetud nimelises Elektrosila tehases. S. M. Kirov, kogukaal 1142 g, staatori läbimõõt 14 m, kogukõrgus 8,9 m, postide arv 96.
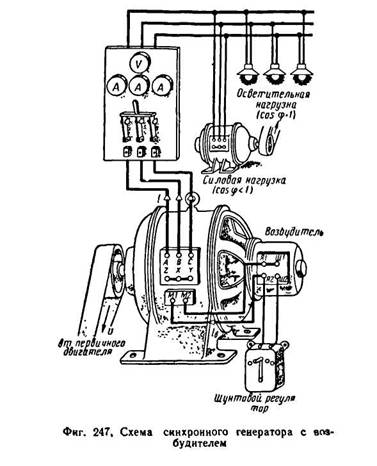
Joonisel fig. 247 kujutab sünkroongeneraatori skeemi koos ergutiga, mis varustab toite- ja valgustuskoormust. Joonisel fig. 248 dan elektriskeem sünkroongeneraatori ühendused koormusega.
Sünkroongeneraatorite staatorimähised on valmistatud samamoodi nagu asünkroonmootorite staatorimähised.
Generaatori kolmefaasiliste mähiste kõik kuus otsa kuvatakse tavaliselt selle kilbil. Ühendades mähiste kolm otsa ühte ühisesse nullpunkti ja viies mähiste kolm algust välisvõrku, saame mähiste tähtühenduse (joon. 249, a). Ühendage esimese mähise ots teise algusega, teise lõpp kolmanda algusega, kolmanda lõpp esimese mähise algusega ja kolm kraani ühenduspunktidest välisvõrku , saame mähiste ühenduse kolmnurgas (joonis 249, b).
Laevade vahelduvvooluelektrijaamades kasutatakse sõltumatu ergutusega ja iseergastusega sünkroonseid kolmefaasilisi voolugeneraatoreid. Sõltumatu ergutusega generaatoritele on paigaldatud erguti (DC elektrimasin), millel on automaatne ja manuaalne pingeregulaator. Iseergastuvate generaatorite puhul toimub ergutus generaatori staatori pooljuhtalaldi kaudu; pinge isereguleerimine toimub staatiliste seadmete abil.
Sünkroonmasinad võivad töötada nii generaatorite kui ka mootoritena. Olenevalt ajami tüübist on oma nime saanud ka sünkroongeneraatorid. Turbogeneraator on näiteks auruturbiiniga töötav generaator, hüdrogeneraator pöörab vesiratast ja diiselgeneraator on mehaaniliselt ühendatud sisepõlemismootoriga.
Sünkroonmootoreid kasutatakse laialdaselt võimsate kompressorite, pumpade, ventilaatorite juhtimiseks. Sünkroonseid mikromootoreid kasutatakse salvestusseadmete, magnetofonide jms lindiseadme mehhanismide käitamiseks.
Sünkroonmasina staator ei erine konstruktsiooni poolest staatorist asünkroonmootor. Staatori pesadesse asetatakse kolmefaasilised, kahefaasilised või ühefaasilised mähised. Märkimisväärne erinevus on rootor, mis on põhimõtteliselt püsimagnet või elektromagnet. See seab rootori geomeetrilisele kujule erinõuded. Igal magnetil on poolused, mille arv võib olla kaks või enam.
Joonisel fig. Joonisel 7.1 on näidatud kaks generaatorite konstruktsiooni, millel on madala kiirusega ja kiire rootor.
Joonis 7.1
Kiired on reeglina turbogeneraatorid. Nendes olevate magnetpooluste paaride arv on võrdne ühega. Et selline generaator toota elektrit standardsagedus f = 50 Hz, tuleb seda sagedusega pöörata
Sünkroongeneraatori tööpõhimõte põhineb elektromagnetilise induktsiooni nähtusel. Magnetpoolustega rootor tekitab pöörleva magnetvälja, mis staatori mähise ületades indutseerib selles EMF-i. Koormusgeneraatoriga ühendamisel annab generaator vahelduvvoolu.
Nagu ülalpool näidatud, on staatorimähises indutseeritud EMF-i suurus kvantitatiivselt seotud mähise pöörete arvu ja magnetvoo muutumise kiirusega:
Tõhusate väärtuste poole pöördudes saab EMF-i avaldise kirjutada järgmiselt:
kus n on generaatori rootori kiirus,
Ф - magnetvoog,
c on konstantne tegur.
Kui koormus on ühendatud, muutub pinge generaatori klemmidel erineval määral. Seega ei avalda aktiivse koormuse suurendamine pingele märgatavat mõju. Samal ajal mõjutavad generaatori väljundpinget induktiivsed ja mahtuvuslikud koormused. Esimesel juhul demagnetiseerib koormuse suurenemine generaatori ja vähendab pinget, teisel juhul on see kallutatud ja pinge tõuseb. Seda nähtust nimetatakse ankurreaktsiooniks.
Generaatori väljundpinge stabiilsuse tagamiseks on vaja reguleerida magnetvoogu. Kui see on nõrgenenud, tuleb masin magnetiseerida, kui seda suurendada, siis demagnetiseerida. Seda tehakse generaatori rootori ergutusmähisesse antava voolu reguleerimisega.
Lihtsaim kolmefaasiline voolugeneraator on oma konstruktsioonilt sarnane ühefaasilise voolu kolmefaasilise voolugeneraatoriga, ainult selle armatuuril on mitte üks, vaid kolm mähist AX, BY, CZ, mis on ruumis üksteise suhtes nihutatud (joonis 1). 7.2). Kui armatuur nendes mähistes pöörleb, e. d.s. sama sagedus, kuid erinevad faasid. Kui amplituudid e. d.s. generaatori kolm mähist on üksteisega võrdsed ja faasinihe mis tahes kahe külgneva e vahel. d.s. võrdne -j = 120 °, siis kolmefaasiline süsteem e. d.s. nimetatakse sümmeetriliseks.
Sünkroonseid nimetatakse elektrimasinateks, mille pöörlemiskiirus on konstantse suhtega ühendatud selle vahelduvvooluvõrgu sagedusega, millesse see masin kuulub. . Sünkroonmasinad toimivad elektrijaamades vahelduvvoolugeneraatoritena ja sünkroonmootoreid kasutatakse juhtudel, kui on vaja konstantsel kiirusel töötavat mootorit. Sünkroonmasinad on pööratavad, st võivad töötada nii generaatoritena kui ka mootoritena. Sünkroonmasin lülitub generaatorirežiimilt mootorirežiimile, olenevalt sellest, kas sellele mõjub pöörlev või pidurdav mehaaniline jõud. Esimesel juhul saab see võllile mehaanilist energiat ja annab võrku elektrienergiat ning teisel juhul saab ta võrgust elektrienergiat ja annab võllile mehaanilist energiat.
Sünkroonmasinal on kaks põhiosa: rootor ja staator ning staator ei erine asünkroonmasina staatorist. Sünkroonmasina rootor on pöörlevatest elektromagnetitest koosnev süsteem, mille toiteallikaks on välisest allikast libisemisrõngaste ja harjade kaudu rootorile toidetav alalisvool. Staatori mähistes indutseeritakse pöörleva magnetvälja toimel EMF, mis juhitakse generaatori välisesse vooluringi. Pöörleva rootori poolt tekitatud sünkroongeneraatori põhimagnetvoogu ergastatakse välise allika – ergutiga, milleks on tavaliselt väikese võimsusega alalisvoolugeneraator, mis paigaldatakse sünkroongeneraatoriga ühisele võllile. Erguti alalisvool juhitakse rootorile läbi rootori võllile paigaldatud harjade ja liugrõngaste. Rootori pooluste paaride arv määratakse selle pöörlemiskiiruse järgi. Mitmepooluselises sünkroonmasinas on rootoril p poolustepaari ja staatori mähises olevad voolud moodustavad ka pöörleva magnetvälja p pooluste paari (nagu asünkroonmasinas). Rootor peab pöörlema välja pöörlemissagedusega, seetõttu on selle kiirus võrdne:
n = 60f/p (9,1)
F = 50 Hz ja p = 1 juures n = 3000 p/min.
Selle sagedusega pöörlevad tänapäevased turbogeneraatorid, mis koosnevad auruturbiinist ja suure võimsusega sünkroongeneraatorist, mille rootor on ühe pooluste paariga.
Hüdrogeneraatorites on peamiseks mootoriks hüdroturbiin, mille kiirus on 50–750 pööret minutis. Sel juhul kasutatakse sünkroongeneraatoreid, millel on väljaulatuva poolusega rootor, millel on 4 kuni 60 paari pooluseid.
Peamise mootoriga - diisliga ühendatud diiselgeneraatorite pöörlemiskiirus on vahemikus 500 kuni 1500 p / min.
Väikese võimsusega sünkroongeneraatorites kasutatakse tavaliselt iseergastust: ergutusmähist toidab sama generaatori alaldatud vool (joon. 9.2).
Ergastusahela moodustavad generaatori koormusahelasse kuuluvad CT-voolutrafod, kolmefaasilise silla skeemi järgi kokku pandud pooljuhtalaldi ja ergutusmähis OB koos reguleeriva reostaadiga R.
Generaatori iseergutus toimub järgmiselt. Generaatori käivitamise hetkel ilmnevad magnetsüsteemi jääk-induktsiooni tõttu generaatori töömähises nõrk EMF ja voolud. See toob kaasa EMF-i ilmnemise CT-trafode sekundaarmähistes ja väikese voolu ergutusahelas, mis suurendab masina magnetvälja induktsiooni. Generaatori emf suureneb, kuni masina magnetsüsteem on täielikult ergastatud.
Staatori mähise igas faasis indutseeritud EMF-i keskmine väärtus:
Еср = c∙n∙Φ (9.2)
n on rootori kiirus;
Φ on sünkroonmasinas ergastav maksimaalne magnetvoog;
c on konstantne koefitsient, võttes arvesse disainifunktsioonid see masin.
Generaatori klemmi pinge:
U = E - I z, kus
I - vool staatori mähises (koormusvool);
Z on mähise takistus (üks faas).
EMF-i amplituudi peenhäälestamiseks reguleeritakse magnetvoo suurust ergutusmähises oleva voolu muutmisega. EMF-i sinusoidsus tagatakse rootori pooluste tükkidele kindla kuju andmisega väljapaistva poolusega masinates. Implitsiitse poolusega masinates saavutatakse magnetilise induktsiooni soovitud jaotus ergutusmähiste spetsiaalse paigutusega rootori pinnale.
Sünkroonmasinates pöörleb armatuuri mähise voolude ja rootori magnetväli sama kiirusega (sünkroonselt). Sünkroonmasinad on pööratavad, see tähendab, et nad võivad töötada generaatoritena ja mootoritena. Kõige laialdasemalt kasutatakse neid aga generaatoritena, mis on paigaldatud kõikidesse kaasaegsetesse elektrijaamadesse.
Generaatori leiutas silmapaistev vene elektriinsener P. N. Yablochkov. Seda generaatorit kasutati elektriküünalde toiteks ja tööpõhimõtte kohaselt ei erinenud see kaasaegsetest generaatoritest, olles esimene mitmefaasiline generaator. Selle staatorile pandi mitu üksteisest eraldatud mähist, millest igaühel oli oma vooluring küünalde rühmaga.
1888. aastal ehitas teine silmapaistev vene elektriinsener M. O. Dolivo-Dobrovolsky maailma esimese kolmefaasilise generaatori võimsusega umbes 3 kVA.
Sünkroongeneraatoril on kaks peamist kella, rootor ja staator.
Rootor (masina liikuv, pöörlev osa) moodustab pöörlevatest elektromagnetitest, mis töötavad välisest allikast tuleva alalisvooluga.
Staator (masina fikseeritud osa) ei erine asünkroonse masina staatorist. Selle mähises indutseerib rootori pöörleva magnetvälja toime generaatori välisesse vooluringi tarnitud elektromagnetvälja (mootori režiimis rakendatakse staatorimähisele võrgupinge). See generaatori konstruktsioon võimaldab kõrvaldada libisevad kontaktid generaatori koormusahelas (staatori mähis on otseselt ühendatud koormusega) ja töömähis usaldusväärselt isoleerida masina korpusest, mis on väga oluline kaasaegsete suure võimsusega generaatorite jaoks. kõrgetel pingetel. Pöörleva rootori poolt tekitatud sünkroongeneraatori peamine magnetvoog ergastatakse välisest ergutiallikast, milleks on tavaline alalisvoolugeneraator (võimsusega 0,5-10% generaatori võimsusest). Erguti paigaldatakse generaatoriga ühisele võllile või ühendatakse generaatori võlliga siduri või rihmülekande abil. Erguti alalisvool läbib rootori mähise läbi kahe rõnga ja rootori võllile paigaldatud fikseeritud harjade.
Oma konstruktsiooni järgi eristavad rootorid väljapaistvat poolust (joonis 5-25, a) ja kaudset poolust (joonis 5-25, b). Rootori pooluste paaride arv määratakse selle pöörlemiskiiruse järgi. Tekitatud EMF-i sagedusel 50 Hz pöörleb suure kiirusega turbogeneraatori kaudse poolusega rootor
3000 p/min, millel on üks pooluste paar, samal ajal kui väikese kiirusega hüdrogeneraatori (mille pöörlemiskiiruse määrab veesurve kõrgus) väljaulatuva poolusega rootor, mis pöörleb kiirusel 50–750 p/min. pooluste arv vastavalt 60 kuni 4.
Väikese võimsusega sünkroongeneraatorid (kuni 100 kVA) on reeglina iseergastuvad: ergutusmähist toidab sama generaatori alaldatud vool (joon. 5-26). Ergastusahela moodustavad generaatori koormusahelasse kuuluvad voolutrafod, pooljuhtalaldi PV, mis on kokku pandud näiteks kolmefaasilise sillaahela järgi, ja generaatori OB ergutusmähis koos reguleeriva reostaadiga R .
Generaatori iseergutus toimub järgmiselt. Generaatori käivitamise hetkel ilmnevad magnetsüsteemi jääk-induktsiooni tõttu generaatori töömähises nõrk EMF ja voolud. See toob kaasa EMF-i ilmnemise CT-trafode sekundaarmähistes ja väikese voolu ergutusahelas, mis suurendab masina magnetvälja induktsiooni. Generaatori emf suureneb, kuni masina magnetsüsteem on täielikult ergastatud.
Selliseid generaatoreid (ühefaasilisi ja kolmefaasilisi) kasutatakse väikese võimsusega madalpinge mobiilsetes elektrijaamades, mida kasutatakse näiteks põllumajanduses lammaste ja lüpsilehmade elektriliseks pügamiseks, samuti maapiirkondade mobiilsete kinoseadmete varustamiseks, jne. Nendes generaatorites tehakse töömähis sageli rootoril ja staatori sisepinnale on paigutatud väljendunud poolustega pooluste süsteem. Generaator on ühendatud välise koormusega libisevate voolukollektorite (rootori teljel rõngastega harjad) kaudu.
Kui rootor pöörleb, ületab pooluste magnetvoog staatori mähise ja indutseerib selles elektromagnetilise induktsiooni seaduse kohaselt EMF: E \u003d 4,44 * f * w * kw * F, kus:
F on vahelduvvoolu sagedus, Hz; w on pöörete arv; kw – mähistegur; Ф - magnetvoog.
Sünkroongeneraatori indutseeritud EMF (pinge, vool) sagedus: f = p*n/60, kus:
P on pooluste paaride arv; n on rootori pöörlemiskiirus, rpm.
Asendamine: E = 4,44*(n*r/60)*w*kw*F ja, olles määranud: 4,44*(r/60)*w*kw – viitab masina konstruktsioonile ja loob projekteerimiskoefitsiendi: C = 4,44 * (lk/60)*w*kw.
Seejärel: E \u003d SE * p * F.
Seega, nagu iga elektromagnetilise induktsiooni seadusel põhineva generaatori puhul, on indutseeritud EMF võrdeline masina magnetvoo ja rootori pöörlemiskiirusega.
Sünkroonmootori tööpõhimõte.
Sünkroonmootori tööpõhimõte põhineb armatuuri magnetväljade ja induktiivpooluste vastastikusel mõjul. Seadme ümberpööratud konstruktsiooni korral on armatuuri ja induktiivpooli asukoht vastupidine, see tähendab, et esimene asub rootoril ja teine staatoril. Seda võimalust kasutavad krüogeensed sünkroonmasinad, mille ergutusmähiste koostis sisaldab ülijuhtivusomadustega materjale.
Mootori käivitamisel kiirendatakse seda sageduseni, mis on lähedane magnetvälja pöörlemissagedusele tühimikus. Alles pärast seda läheb see sünkroonrežiimi. Sellises olukorras ristuvad armatuuri ja induktiivpooli magnetväljad. Seda hetke nimetatakse sünkroniseerimisse sisenemiseks.
Sünkroonmasinate ergastamise viisid.
Ergutusmähise toiteks on ette nähtud erguti, see on alalisvoolu generaator, mille armatuur on mehaanilise seadme abil ühendatud masina võlliga.
Ergastusmeetodi järgi jagunevad sünkroonmasinad kahte tüüpi:
Iseseisvat tüüpi ergastus.
Eneseergutus.
Sõltumatu ergastusega eeldab vooluahel alamerguti olemasolu, mis toidab: peaerguti mähis, reguleerimise reostaat, juhtimisseadmed, pingeregulaatorid jne Lisaks sellele meetodile saab ergastust teostada generaatorist, mis täidab abifunktsiooni, seda juhib sünkroon- või asünkroontüüpi mootor.
Eneseergutamiseks, mähis saab toite pooljuhtidel või ioontüüpi töötava alaldi kaudu.
Turbo- ja hüdrogeneraatorite jaoks kasutatakse türistori ergutusseadmeid. Ergastusvoolu reguleerimine toimub automaatselt, kasutades ergutusregulaatorit, väikese võimsusega masinate puhul on tüüpiline reguleerivate reostaatide kasutamine, need on kaasatud ergutusmähise ahelasse.
Sünkroonmootori eelised ja puudused.
Sünkroonmootoril on asünkroonse mootori ees mitmeid eeliseid:
1. Kõrge võimsustegur cosФ=0,9.
Võimalus kasutada ettevõtetes sünkroonmootoreid üldise võimsusteguri suurendamiseks.
3. Kõrge kasutegur, see on rohkem kui asünkroonmootoril (0,5-3%), see saavutatakse vase ja suurte CosФ kadude vähendamisega.
Omab suurt vastupidavust, mis on tingitud suurenenud õhuvahest.
Sünkroonmootori pöördemoment on otseselt võrdeline esimese võimsuse pingega. See tähendab, et sünkroonmootor on võrgupinge suuruse muutuste suhtes vähem tundlik.
Sünkroonmootori puudused:
Käivitusseadmete keerukus ja kõrge hind.
Sünkroonmootoreid kasutatakse masinate ja mehhanismide juhtimiseks, mis ei pea kiirust muutma, samuti mehhanismide jaoks, milles kiirus jääb koormuse muutumisel konstantseks: (pumbad, kompressorid, ventilaatorid.)
Sünkroonmootori käivitamine.
Arvestades sünkroonmootori käivitusmomendi puudumist, kasutatakse selle käivitamiseks järgmisi meetodeid:
Asünkroonse mootori käivitamine.
Alusta abimootoriga.
Sünkroonmootori käivitamine abimootori abil saab toimuda ainult ilma selle võlli mehaanilise koormuseta, s.t. praktiliselt tühikäigul. Sel juhul muutub mootor käivitusperioodiks ajutiselt sünkroongeneraatoriks, mille rootorit juhib väike abimootor. Selle generaatori staator on ühendatud võrguga paralleelselt, järgides kõiki selle ühenduse jaoks vajalikke tingimusi. Pärast staatori ühendamist võrku, abiseade ajami mootor mehaaniliselt välja lülitatud. See käivitusmeetod on keeruline ja sellel on lisaks abimootor.
Asünkroonse mootori käivitamine.
Kõige tavalisem viis sünkroonmootorite käivitamiseks on asünkroonkäivitus, mille käigus sünkroonmootor muutub käivituse ajaks asünkroonseks mootoriks. Asünkroonse käivitusmomendi moodustumise võimaldamiseks asetatakse väljaulatuva poolusega mootori pooluste tükkide soontesse käivituslühismähis. See mähis koosneb messingist varrastest, mis on sisestatud otste soontesse ja on mõlemast otsast lühistatud vaskrõngastega.
Mootori käivitamisel ühendatakse staatori mähis vahelduvvooluvõrku. Käivitusperioodi ergutusmähis (3) on suletud teatud takistusega Rg, joon. 45, klahv K on asendis 2, takistus Rg = (8-10) Rv. Algmomendil S = 1 käivitamisel indutseerib staatori pöörlev magnetväli ergutusmähise suure pöörete arvu tõttu ergutusmähises EMF Ev, mis võib ulatuda väga suure väärtuseni ja kui ergutusmähis ei ole käivitamise ajal takistuseks Rg sisse lülitatud, tekib isolatsiooni purunemine.
Riis. 45 Joon. 46.
Sünkroonmootori käivitamise protsess viiakse läbi kahes etapis. Kui staatorimähis (1) on võrku ühendatud, tekib mootoris pöörlev väli, mis indutseerib lühises rootorimähises (2) elektromagnetvälja. Tegevuse all, mis voolab vardadesse voolu. Pöörleva magnetvälja ja voolu vastasmõju tulemusena tekib lühismähises pöördemoment, nagu asünkroonmootoris. Tänu sellele momendile kiirendab rootor nullilähedase libisemiseni (S=0,05), joon. 46. See lõpetab esimese etapi.
Mootori rootori sünkroonsusse tõmbamiseks on vaja tekitada selles magnetväli, lülitades sisse alalisvoolu ergutusmähise (3) (lülitades võtme K asendisse 1). Kuna rootor kiirendatakse lähedase kiiruseni
sünkroonseks, siis on staatori ja rootori väljade suhteline kiirus väike. Poolused leiavad üksteist sujuvalt üles. Ja pärast mitmeid libisemisi tõmmatakse vastaspoolused ligi ja rootor tõmmatakse sünkroonsusse. Pärast seda pöörleb rootor sünkroonsel kiirusel ja selle pöörlemiskiirus on konstantne, joon. 46. See lõpetab käivitamise teise etapi.
28. Sünkroongeneraatori armatuurireaktsioon aktiiv-, induktiiv-, mahtuvus- ja segakoormustega.
Joonisel fig. 20.5 ning esitatakse kahepooluselise generaatori staator ja rootor. Staator näitab osa faasimähisest. Rootor on terava poolusega, pöörleb vastupäeva. Vaadeldaval ajahetkel on rootor vertikaalasendis, mis vastab faasimähise maksimaalsele EMF-le E0. Kuna aktiivse koormuse all olev vool on EMF-iga faasis, vastab rootori näidatud asend ka maksimaalsele voolule. Olles kujutanud ergastusvälja (rootori) magnetinduktsiooni jooni ja staatori mähisevälja magnetilisi induktsioonjooni, näeme, et staatori MMF F1 on suunatud ergastuse MMF Fv0 suhtes risti. Seda järeldust kinnitab ka sama juhtumi jaoks koostatud vektordiagramm. Selle diagrammi koostamise protseduur on järgmine: vastavalt generaatori rootori ruumilisele asukohale joonistame ergastuse MMF vektori Fv0; 90 ° nurga all selle vektori suhtes mahajäämise suunas joonistame staatori mähises ergastava magnetvälja poolt indutseeritud EMF-vektori E0; kui on ühendatud puhtalt aktiivne koormus, on staatorimähis I1 vool faasis EMF-ga E0 ja seetõttu nihutatakse selle voolu tekitatud MMF-i vektorit F1 ruumis vektori Fv0 suhtes 90 ° võrra.Riis. 20.5. Sünkroongeneraatori armatuuri reaktsioon aktiivsega (a),
seotud artiklid