Wie hoch ist der Anlaufstrom eines Asynchronmotors? Methoden zum Starten von Asynchronmotoren
Trägerraketen Motoreigenschaften .
Beim Starten beschleunigt der Motorrotor unter Überwindung des Lastdrehmoments und des Trägheitsmoments von der Drehzahl N= 0 Zu N . In diesem Fall variiert das Gleiten S N = 1 Zu S . Beim Anfahren müssen zwei Grundvoraussetzungen erfüllt sein: Das Drehmoment muss größer sein als das Widerstandsmoment ( M vr > M Mit) und Anlaufstrom ICH N sollte so klein wie möglich sein.
Je nach Ausführung des Rotors (Kurzschluss oder Phase), Motorleistung und Art der Belastung möglich verschiedene Möglichkeiten Starten: Direktstart, Start mit zusätzlichen Widerständen, Start mit reduzierter Spannung usw. Im Folgenden werden die verschiedenen Startmethoden näher erläutert.
Direktstart. Das Starten eines Motors durch direktes Anschließen der Statorwicklung an die Netzspannung wird als Direktstart bezeichnet. Die Direktstartschaltung ist in Abb. dargestellt. 3.22. Wenn der Schalter im ersten Moment eingeschaltet wird, gleitet er S = l und der reduzierte Strom im Rotor und der Statorstrom gleich diesem
, (3.37)
maximal sind (siehe Abschnitt 3.19 bei s=1). Wenn der Rotor beschleunigt, nimmt der Schlupf ab und daher ist der Strom am Ende des Starts deutlich geringer als im ersten Moment. Bei Serienmotoren mit Direktstart beträgt die Vielfachheit des Anlaufstroms k I = I P / I 1NOM = (5,...,7), wobei für Motoren höherer Leistung der größere Wert gilt.

Der Wert des Startdrehmoments ergibt sich aus (3.23) bei s = 1: 
Aus Abb. In Abb. 3.18 ist ersichtlich, dass das Anlaufdrehmoment nahe am Nenndrehmoment liegt und deutlich unter dem kritischen liegt. Bei Serienmotoren beträgt die Startmomentmultiplizität M P / M NOM = (1,0,…,1,8).
Die angezeigten Daten zeigen, dass beim Direktstart ein Stromstoß im Netz auftritt, das den Motor versorgt, was zu einem so starken Spannungsabfall führen kann, dass andere von diesem Netz gespeiste Motoren möglicherweise anhalten. Andererseits kann es sein, dass der Motor aufgrund des geringen Anlaufdrehmoments beim Anfahren unter Last das Widerstandsmoment an der Welle nicht überwindet und sich nicht bewegt. Aufgrund dieser Nachteile ist der Direktanlauf nur für Motoren kleiner und mittlerer Leistung (bis ca. 50 kW) einsetzbar.
Starten von Motoren mit verbesserten Starteigenschaften. Verbesserte Starteigenschaften Asynchronmotoren wird erreicht, indem der Effekt der Stromverdrängung im Rotor aufgrund der speziellen Konstruktion des Käfigläufers genutzt wird. Der Effekt der Stromverdrängung ist wie folgt: Die Flussverkettung und die induktive Reaktanz der X 2 -Leiter in der Rotornut sind umso höher, je näher sie am Boden der Nut liegen (Abb. 3.23). Außerdem ist X 2 direkt proportional zur Frequenz des Rotorstroms.
Folglich gilt beim Starten des Motors, wenn s = 1 und f 2 = f 1 = 50 Hz, induktive Reaktanz X 2 = max und unter dessen Einfluss wird der Strom in die äußere Schicht der Nut gedrückt. Die Stromdichte j entlang der h-Koordinate verteilt sich entlang der in Abb. 3.24 dargestellten Kurve. Dadurch fließt der Strom hauptsächlich durch den äußeren Abschnitt des Leiters, d. h. über einen deutlich kleineren Stabquerschnitt, und daher ist der Wirkwiderstand der Rotorwicklung R 2 viel größer als im Normalbetrieb. Dadurch sinkt der Anlaufstrom und das Anlaufdrehmoment MP steigt (siehe (3.37), (3.38)). Wenn der Motor beschleunigt, sinken der Schlupf und die Frequenz des Rotorstroms und erreichen am Ende des Starts 1 - 4 Hz. Bei dieser Frequenz ist der induktive Blindwiderstand klein und der Strom verteilt sich gleichmäßig über den gesamten Leiterquerschnitt. Durch eine stark ausgeprägte Stromverdrängungswirkung wird ein Direktstart mit geringeren Stromstößen und höheren Anlaufmomenten möglich.
Zu den Motoren mit verbesserten Starteigenschaften gehören Motoren mit Tiefschlitzrotoren, Doppelkäfigläufern und einige andere.
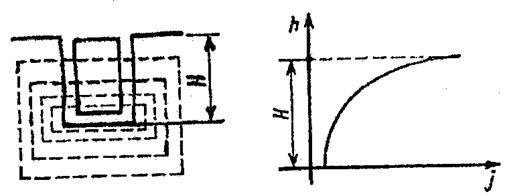
Abb.3.23 Abb. 3.24
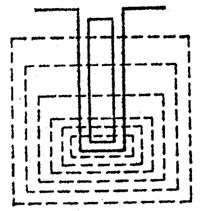
Motoren mit tiefen Nuten. Wie in Abb. 3.25 dargestellt, ist die Rotornut in Form eines schmalen Schlitzes ausgeführt, dessen Tiefe etwa zehnmal größer ist als seine Breite. In diesen Schlitzschlitzen wird die Wicklung in Form schmaler Kupferstreifen platziert. Die magnetische Flussverteilung zeigt, dass die Induktivität und die induktive Reaktanz an der Unterseite des Leiters deutlich größer sind als an der Oberseite. Daher wird beim Starten der Strom in den oberen Teil des Stabes gedrückt und der Wirkwiderstand erhöht sich deutlich. Wenn der Motor beschleunigt, nimmt der Schlupf ab und die Stromdichte über den Querschnitt wird nahezu gleich. Um den Effekt der Stromverdrängung zu verstärken, werden tiefe Nuten nicht nur in Form eines Schlitzes, sondern auch in Trapezform hergestellt. In diesem Fall ist die Tiefe der Nut etwas geringer als bei einer rechteckigen Form.
Doppelkäfigmotoren. Bei solchen Motoren sind die Rotorwicklungen in Form von zwei Käfigen ausgeführt (Abb. 3.26): in Außennuten 1 Im Inneren ist eine Wicklung aus Messingleitern angebracht 2 – Wicklung aus Kupferleitern. Somit hat die äußere Wicklung einen höheren Wirkwiderstand als die innere. Beim Starten ist die äußere Wicklung an einen sehr schwachen magnetischen Fluss und die innere Wicklung an ein relativ starkes Feld gekoppelt. Dadurch wird der Strom in die Außenzelle gedrängt und in der Innenzelle fließt nahezu kein Strom.
Wenn der Motor beschleunigt, fließt der Strom vom Außenkäfig in den Innenkäfig und fließt bei s = s NOM hauptsächlich durch den Innenkäfig. Der Strom im Außenkäfig ist relativ gering. Das resultierende Anlaufdrehmoment, also die Summe der Drehmomente der beiden Käfige, ist deutlich größer als bei Motoren normaler Bauart und etwas größer als bei Motoren mit tiefer Nut. Allerdings ist zu bedenken, dass die Kosten für Motoren mit Doppelkäfigläufer höher sind.
Beginnen Sie mit dem Wechseln der Statorwicklung.
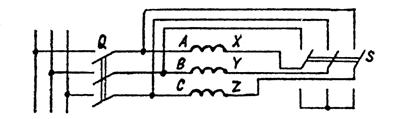
Wenn im Normalbetrieb des Motors die Statorphasen im Dreieck geschaltet sind, dann sind sie, wie in Abb. 3.27 dargestellt, beim Start zunächst im Stern geschaltet. Dazu wird zunächst der Schalter Q eingeschaltet und dann der Schalter S in die untere Position gebracht Start. In dieser Position sind die Enden der Phasen X, Y, Z miteinander verbunden, d.h. Die Phasen sind sternförmig verbunden. In diesem Fall ist die Phasenspannung √3-mal kleiner als linear. Dadurch ist der Netzstrom beim Anlauf dreimal geringer als bei einer Dreieckschaltung. Wenn der Rotor am Ende des Starts beschleunigt, wird der Schalter S in die obere Position gebracht und, wie aus Abb. 3.27 werden die Statorphasen wieder zu einem Dreieck verbunden. Der Nachteil dieser Methode besteht darin, dass auch das Anlaufdrehmoment um das Dreifache reduziert wird, da das Drehmoment proportional zum Quadrat der Phasenspannung ist, die bei Sternschaltung der Phasen um das Dreifache kleiner ist. Daher ist diese Methode für kleine Lastdrehmomente und nur für Motoren anwendbar, die normal arbeiten, wenn die Statorwicklungen im Dreieck geschaltet sind.
Beginnen Sie, wenn zusätzliche Widerstände an den Statorkreis angeschlossen werden . (Abb. 3.28). Vor dem Start befindet sich der Schalter (Anlasser) im geöffneten Zustand und Schalter Q 1 schließt.
In diesem Fall sind in den Statorkreis zusätzliche Widerstände R ADD eingebunden. Dadurch wird die Statorwicklung mit reduzierter Spannung U 1n = U 1NOM versorgt – ICH n R HINZUFÜGEN. Nachdem der Motor beschleunigt hat, schließt der Schalter Q 2 und die Statorwicklung wird auf die Nennspannung U 1 NOM eingeschaltet. Durch Auswahl von R ADD können Sie den Anlaufstrom auf das zulässige Maß begrenzen. Es ist zu beachten, dass das Anlaufdrehmoment proportional zu U 2 1P geringer ist und (U 1P / U 1NOM) 2 nominal beträgt. Es ist wichtig zu beachten, dass es bei dieser Startmethode zu erheblichen Widerstandsverlusten R ADD (R ADD) kommt ICH 2 1n). Anstelle der Widerstände R ADD ist es möglich, Spulen mit der induktiven Reaktanz X ADD in der Nähe von R ADD einzubauen.
Durch den Einsatz von Spulen können Verluste im Anlaufwiderstand reduziert werden.


Abb.3.29 Abb.3.28
Spartransformator startet. Zusätzlich zu diesen Methoden können Sie den sogenannten Spartransformatorstart verwenden.
Das entsprechende Diagramm ist in Abb. 3.29 dargestellt. Vor dem Start wird der Schalter S auf Position gestellt 1 , und dann wird der Spartransformator eingeschaltet und der Stator mit einer reduzierten Spannung U 1P versorgt. Der Motor beschleunigt bei reduzierter Spannung und am Ende der Beschleunigung wird Schalter S in die Position gebracht 2 und der Stator wird mit der Nennspannung U 1nom versorgt.
Wenn das Übersetzungsverhältnis des Abwärtstransformators N , dann der Strom ICH an seinem Eingang wird in sein N mal weniger. Darüber hinaus wird auch der Anlaufstrom berücksichtigt N mal weniger, d.h. der Anlaufstrom im Netzwerk wird in sein Nr. 2 mal weniger als beim Direktstart.
Diese Methode ist zwar besser als die in Abschnitt 3.14.7 besprochenen, aber viel teurer.
Starten eines Motors mit gewickeltem Rotor.
Das Starten eines Motors mit gewickeltem Rotor erfolgt durch Anschließen eines Startwiderstands an den Rotorkreis, wie in Abb. 3.30 dargestellt. Die Phasenanfänge der Rotorwicklungen sind mit Schleifringen verbunden und über Bürsten mit einem Anlaufrheostat mit Widerstand verbunden Rp.
![]() Der Anlaufwiderstand des Rheostats wird auf die Statorwicklung reduziert Rp
wird so berechnet, dass das Anlaufmoment maximal ist, d.h. gleich kritisch. Seit dem Anfahren des Schiebers s P= 1 also s P = 1 = s K, Gleichwertigkeit M P = M P max = M K wird zur Verfügung gestellt. Dann
Der Anlaufwiderstand des Rheostats wird auf die Statorwicklung reduziert Rp
wird so berechnet, dass das Anlaufmoment maximal ist, d.h. gleich kritisch. Seit dem Anfahren des Schiebers s P= 1 also s P = 1 = s K, Gleichwertigkeit M P = M P max = M K wird zur Verfügung gestellt. Dann  .
.
Der Motor startet gemäß der in Abb. 3.31 dargestellten Kurve. Im Moment des Anfahrens liegt der Arbeitspunkt auf der mechanischen Kennlinie in Position A
, und wenn der Motor beschleunigt, bewegt er sich entlang der Kurve 1
, was einem vollständig eingeschalteten Rheostat entspricht. In einem Moment, der dem Punkt entspricht e, die erste Stufe des Rheostaten wird eingeschaltet und das Drehmoment steigt schlagartig bis zum Punkt b – der Betriebspunkt des Motors verschiebt sich zur Kurve 2; In dem dem Punkt d entsprechenden Zeitpunkt wird die zweite Stufe des Rheostaten abgeschaltet, der Arbeitspunkt springt auf Punkt Mit und der Motor erreicht die natürliche Kennlinie 3 und dann den Punkt f. Der Rheostat wird kurzgeschlossen, die Rotorwicklung wird kurzgeschlossen und die Bürsten werden aus den Ringen zurückgezogen. 
Somit ermöglicht der gewickelte Rotor den Betrieb von Hochleistungs-Asynchronmotoren mit begrenztem Anlaufstrom. Diese Startmethode ist jedoch mit erheblichen Verlusten im Startwiderstand verbunden. Darüber hinaus ist ein Motor mit gewickeltem Rotor teurer als ein Käfigläufermotor. Daher wird ein Wickelläufermotor nur bei hoher Leistung und hohem Antriebsbedarf eingesetzt.
Im Moment des Anlassens ist die Rotorgeschwindigkeit des Motors Null und das rotierende Feld erreicht sofort eine synchrone Geschwindigkeit in Bezug auf den Rotor, wodurch eine große EMK in der Rotorwicklung induziert wird. In diesem Fall sind die Rotor- und Statorströme um ein Vielfaches höher als ihre Minimalwerte, da sie mit zunehmendem Rotorschlupf, d. h. mit einer Verringerung seiner Rotationsgeschwindigkeit (Abb. 10).
Der Anlaufstrom von Asynchronmotoren mit Käfigläufer ist 5–10 Mal höher als der Nennstrom (das Anlaufdrehmoment beträgt 1,1–1,8 des Nenndrehmomentwerts). Da dieser Strom nur für kurze Zeit und nur während des Startvorgangs durch die Motorwicklung fließt, kommt es bei nicht sehr häufigen Motorstarts nicht zu einer Überhitzung des Elektromotors. Daher werden asynchrone Elektromotoren mit geringer Leistung normalerweise durch einfaches Anschließen an das Netzwerk gestartet. Der große Anlaufstrom großer Elektromotoren für die sie versorgenden Stromnetze verursacht jedoch plötzliche und erhebliche (insbesondere in Netzen mit geringer Leistung) Spannungsspitzen, die sich negativ auf andere im selben Netz enthaltene Stromverbraucher auswirken.
Wie aus Abb. ersichtlich ist. 10 ist das Anlaufdrehmoment eines Asynchronmotors deutlich geringer als das Maximum, und wenn die Belastung der Rotorwelle größer ist M p, der Motor startet nicht. Wenn der Stator außerdem nicht vom Netz getrennt wird, führt ein großer Anlaufstrom zu einer Überhitzung der Wicklungen und einem Ausfall des Motors.
Um die beschriebenen ungünstigen Situationen zu verhindern, ist es erforderlich, den Anlaufstrom von Asynchronmotoren beim Anlegen der Versorgungsspannung zu begrenzen oder das Anlaufmoment zu erhöhen.
Die Reduzierung der Spannung an den Wicklungen eines Asynchron-Elektromotors beim Anlauf wird auf verschiedene Weise erreicht:
Beginnen mit einem Spartransformator oder einem Induktionsregler;
Beginnend mit der Umstellung der Statorwicklung von Stern auf Dreieck;
Beginnend mit der Einbeziehung eines zusätzlichen Widerstands in die Statorwicklung des Motors.
Mit abnehmender Anlaufspannung sinkt jedoch auch das Anlaufdrehmoment eines Asynchronmotors, da es proportional zum Quadrat der Anlaufspannung ist. Daher können die angegebenen Startmethoden hauptsächlich für Antriebsmotoren von Mechanismen angewendet werden, die beim Starten keine großen Startdrehmomente erfordern (z. B. Starten eines Lüftermotors, eines unbelasteten Motors, eines Motors). Leerlauf usw.).
Ein asynchroner Elektromotor mit gewickeltem Rotor wird mit einem Anlaufwiderstand mit maximalem Widerstand gestartet R ext, in Reihe mit der Rotorwicklung geschaltet (siehe Abb. 3). In diesem Fall der kritische Schlupf S k = ( R" 2 +R ext)/( X 1 +X" 2) nimmt zu und die Größe des kritischen Moments M k = 3 pu 1 2 /2 1 ( X 1 +X" 2) ändert sich nicht. Künstliche Moment-Schlupf-Kennlinien mit zusätzlichem Widerstand sind in Abb. dargestellt. 11. Größe R Wird ext so gewählt, dass der kritische Schlupf gleich eins ist, dann steigt das Anlaufdrehmoment auf einen kritischen Wert. Zunahme M tritt aufgrund einer Erhöhung der aktiven Komponente des Stroms auf. Der Effektivwert des Anlaufstroms nimmt ab.
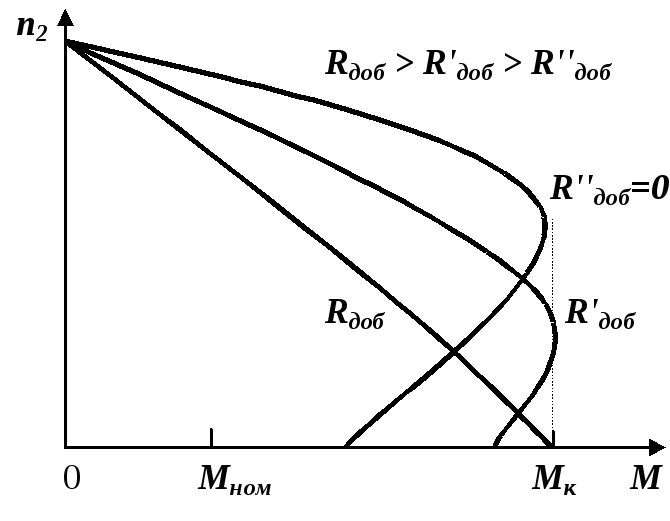
Mit zunehmender Drehzahl nimmt die Rotationsfrequenz des Magnetfeldes relativ zum Rotor ab. Dementsprechend nehmen EMK und Rotorstrom ab. Daher können Sie mit zunehmender Motordrehzahl den Wert des Anlaufwiderstands im Rotorwicklungskreis schrittweise verringern ( R" ext), ohne befürchten zu müssen, dass der Motorstrom auf für ihn gefährliche Werte ansteigt. Bei vollständig entferntem Anlaufrheostatwiderstand ( R"" ext = 0) Motorstart endet. Mit dieser Methode können Sie das zum Starten erforderliche Motorstartdrehmoment bereitstellen.
Wenn ein Gerät, ein Mechanismus oder ein Gerät in Betrieb genommen wird, treten in ihnen für einige Zeit Prozesse auf, die als instationär oder startend bezeichnet werden. Die bekanntesten Beispiele aus dem Leben – etwa das Anfahren eines beladenen Karrens oder Zuges – zeigen ganz deutlich, dass der anfängliche kräftige Stoß meist mehr erfordert als die darauffolgenden Anstrengungen.
Die gleichen Phänomene treten auf elektrische Geräte: Lampen, Elektromotoren, Elektromagnete usw. Startvorgänge in diesen Geräten hängen vom Zustand der Arbeitselemente ab: dem Glühfaden der Lampe, dem Magnetisierungszustand des Kerns der Elektromagnetspule, dem Ionisierungsgrad des Zwischenelektrodenspalts usw. Betrachten Sie zum Beispiel den Glühfaden einer Beleuchtungslampe. Es ist bekannt, dass es im kalten Zustand einen deutlich geringeren Widerstand aufweist als im kalten Zustand.
Erhitzen auf 1000 Grad. im Arbeitsmodus. Versuchen Sie, den Widerstand zu berechnen
Der Glühfaden einer 100-Watt-Glühbirne hat etwa 490 Ohm, gemessen mit einem Ohmmeter im Ruhezustand beträgt dieser Wert weniger als 50 Ohm. Jetzt kommt der interessanteste Teil: Zählen Sie den Anlaufstrom und Sie werden verstehen, warum die Glühbirnen beim Einschalten aufleuchten.
Es stellt sich heraus, dass der Strom beim Einschalten 4-5 A erreicht, was mehr als 1 kW ist. Warum leuchten 100-Watt-Glühbirnen nicht? Ja, nur weil der Glühfaden der Glühbirne beim Erhitzen ausbrennt
Der wachsende Widerstand, der im stationären Zustand konstant wird, ist größer als der Anfangswert und begrenzt den Betriebsstrom auf etwa 0,5 A.
Elektromotoren haben in der Technik ein breites Anwendungsspektrum, daher ist die Kenntnis der Besonderheiten ihrer Anlaufeigenschaften wichtig. großer Wert für den ordnungsgemäßen Betrieb elektrischer Antriebe. Schlupf und Drehmoment an der Welle sind die wesentlichen Einflussgrößen auf den Anlaufstrom. Der erste bezieht sich auf die Rotationsgeschwindigkeit elektromagnetisches Feld mit der Rotordrehzahl und nimmt ab, wenn die Drehzahl von 1 auf den Minimalwert ansteigt, und der zweite bestimmt die mechanische Belastung der Welle, maximal zu Beginn des Startvorgangs und nominal nach voller Beschleunigung. im Moment des Anlaufs entspricht einem Transformator mit kurzgeschlossener Sekundärwicklung. Wegen ihrer Kleinheit
Widerstand erreicht der Anlaufstrom des Motors schlagartig das Zehnfache seines Nennwertes.
Die Stromversorgung der Wicklungen führt zu einer Erhöhung der Sättigung des Rotorkerns mit dem Magnetfeld und dem Auftreten von EMK. Selbstinduktion, die zu einer Erhöhung der Induktivität führt
Stromkreiswiderstand. Der Rotor beginnt sich zu drehen und der Schlupfkoeffizient nimmt ab, d.h. Der Motor beschleunigt. Dabei sinkt der Anlaufstrom mit zunehmendem Widerstand auf einen stabilen Wert.
Es treten Probleme durch erhöhte Einschaltströme auf
aufgrund von Überhitzung der Elektromotoren, Überlastung der Stromnetze im Moment
Anlauf, das Auftreten stoßartiger mechanischer Belastungen in verbundenen Mechanismen, beispielsweise Getrieben. In der modernen Technik gibt es zwei Klassen von Geräten, die diese Probleme lösen: Sanftstarter und Frequenzumrichter.
Ihre Wahl ist eine technische Aufgabe mit Analyse vieler Betriebsabläufe
Eigenschaften. Einladen reale Bedingungen Die Anwendung von Elektromotoren ist in zwei Gruppen unterteilt: Pumpen-Lüfter-Motoren und allgemeine Industriemotoren. Softstarter werden hauptsächlich für Lüftergruppenlasten eingesetzt. Solche Regler begrenzen den Anlaufstrom auf einen Wert, der 2 Nennwerte nicht überschreitet, statt auf das 5- bis 10-fache beim normalen Anlauf, indem sie die Spannung der Wicklungen ändern.
Elektromotoren sind in der Industrie am weitesten verbreitet, zeichnen sich jedoch durch ihr einfaches Design und ihre geringen Kosten aus Rückseite- schwierige Startbedingungen, die mit Hilfe von Frequenzumrichtern erleichtert werden. Besonders wertvoll ist die Eigenschaft der Frequenz
Konverter halten den Anlaufstrom aufrecht
für eine lange Zeit - eine Minute oder länger. Das beste Beispiel für moderne Umrichter sind intelligente Geräte, die nicht nur den Startvorgang regeln, sondern den Start auch nach einem bestimmten Betriebskriterium optimieren: Größe und Konstanz des Startstroms, Schlupf, Drehmoment an der Welle, optimaler Leistungsfaktor usw .
Artikel zum Thema